【所属领域】
智能制造、生命医疗
【痛点问题】
国内外已经涌现出了很多优秀的智能助行机器人产品或样机,但针对下肢功能运动障碍患者的智能助行机器人研究仍然存在一定的局限性:
(1)助行机器人对于人体运动意图的识别研究主要依靠力传感器,在运动意图的定义和计算方面的差异较大;
(2)基于助行机器人的步态分析方面成果有限,人体行走能力依靠传统的Holden步行功能分级以及Tinetti平衡与步态量表进行评估,缺乏对步态参数的具体量化评估手段;
(3)自适应参数导纳控制、共享控制及交互力-位置混合控制等方法大多仅能在特定的人机协同系统满足使用,故只能用于单一功能的康复训练,难以满足不同行走能力用户的多样化康复训练需求。
【解决方案】
本成果研究的面向下肢弱肌力人群的智能助行机器人,基于机载的力传感器、激光传感器、Kinect等设备,设计多模态人机交互接口,获取人体运动数据;基于有监督的神经网络步态事件分类算法模型,提取分析步态的时空参数,并且能够应用康复医学功能评定理论进行人体行走能力的智能综合评估,根据评估的行走能力切换对应的机器人模式。

图1 智能助行机器人一代、二代、三代
【性能指标】
1)机器人样机:
人体运动模式识别准确率≥95%;
跟随模式相对位置误差≤15cm,相对角度误差≤20°;
左腿摆动、双支撑相左向重心转移、右腿摆动和双支撑相右向重心转移四个步态相位识别准确率≥95%。
2)运动状态监测及行走能力评估一体化平台:
正常行走、肢体约束异常状态及趔趄、跌倒等紧急状态识别准确率≥90%。
【技术优势】
1.基于混合动态系统理论提出了肢体运动意图演化模型,结合先进滤波算法,提高了运动意图识别的准确性和鲁棒性。
2.基于机载传感器,仅利用非穿戴式方法获取的运动数据,对步态参数进行提取,无需患者穿戴额外设备。
3.构建了评价行走能力的量化指标,实现了符合康复医学功能评定理论的人体行走能力智能综合评估,实现对康复医师的有益补充。
【技术成熟度】
智能助行机器人已有样品/样机
【应用前景】
智能助行机器人在医疗、生产等领域具有巨大的应用前景。首先在医疗领域,我国老年人口逐年增加,所占比重已经超过10%,甚至超过全球老年人口总和的两成。老龄化的过程使得老年人的四肢活动能力逐渐下降,致使生活中产生了很多不便。特别是由脊髓损伤和中风等疾病引起的运动障碍,对于老年人来讲,即使得到及时的治疗,随后的康复训练也显得尤为重要。智能助行机器人通过智能化的人机协调装置来增强身体机能,扩展运动能力,可以为患者提供舒适、有效、安全的康复练习,使得他们可以自主生活,恢复信心,提高生活质量。在生产领域,智能助行机器人可作为在一些环境恶劣场所工作人员的一种辅助设备,它不仅可以减少此类人员不必要的体能消耗,同时也可以提高工作效率。随着机器人学、康复医学以及人工智能技术等新兴学科的不断发展,智能助行机器人技术也在不断的走向成熟。作为多学科交叉成果,助行机器人技术逐渐成为了一个新的研究热点,并在各个领域中得到了广泛应用。
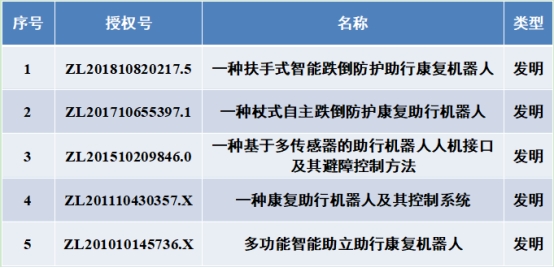
【知识产权】
该成果已申请/授权多项中国发明专利,下表是部分展示:
【资质荣誉】
2016中国商业联合会科学技术奖特等奖
2016日内瓦国际发明展银奖
2019 湖北省技术发明奖一等奖
【合作方式】
技术开发、技术服务、技术许可、技术转让、技术入股、面谈等
【专家介绍】

黄剑,华中科技大学教授、博导,人工智能与自动化学院智能科学与技术系主任,中国测控技术“一带一路”联合实验室副主任,名古屋大学客座教授和巴黎第十二大学访问教授。担任IEEE CIS武汉支会副主席、武汉自动化学会副理事长、中国人工智能学会智能机器人专业委员会常务委员、《IEEE Transactions on Fuzzy Systems》等国际知名期刊编委。在ICRA、WCICA、Humanoid、CBS等国际学术会议担任程序委员会、组织委员会、评奖委员会、专题委员会主席等。长期从事康复与辅助机器人、人-机器人交互及机器人控制研究。发表SCI论文100余篇,获中外授权专利30余件,研发了系列康复机器人产品或装置。获中国商业联合会科学技术特等奖(排1)、湖北省技术发明一等奖(排2)和日内瓦国际发明展金奖。
【联系方式】

CG23003