【成果介绍】
可穿戴设备已成为疾病诊断与治疗方面的一项重要创新技术,在人体生理指标与机能监测方面发挥着极其重要的作用。可穿戴外骨骼机器人技术渐渐融入人类日常生活,但面临着环境多变、骨骼特征复杂、传感电极顺应性差等挑战。本技术针对人-机-环境耦合中的关键难题,开展面向人体运动感知的柔性可穿戴系统研究,研发了面向关节转角、肌肉形变、足底三维力测量的可穿戴柔性传感系统,旨在揭示人体自然运动规律、促进外骨骼机器人研究,为复杂环境中的外骨骼自适应控制提供智能感知技术支撑。
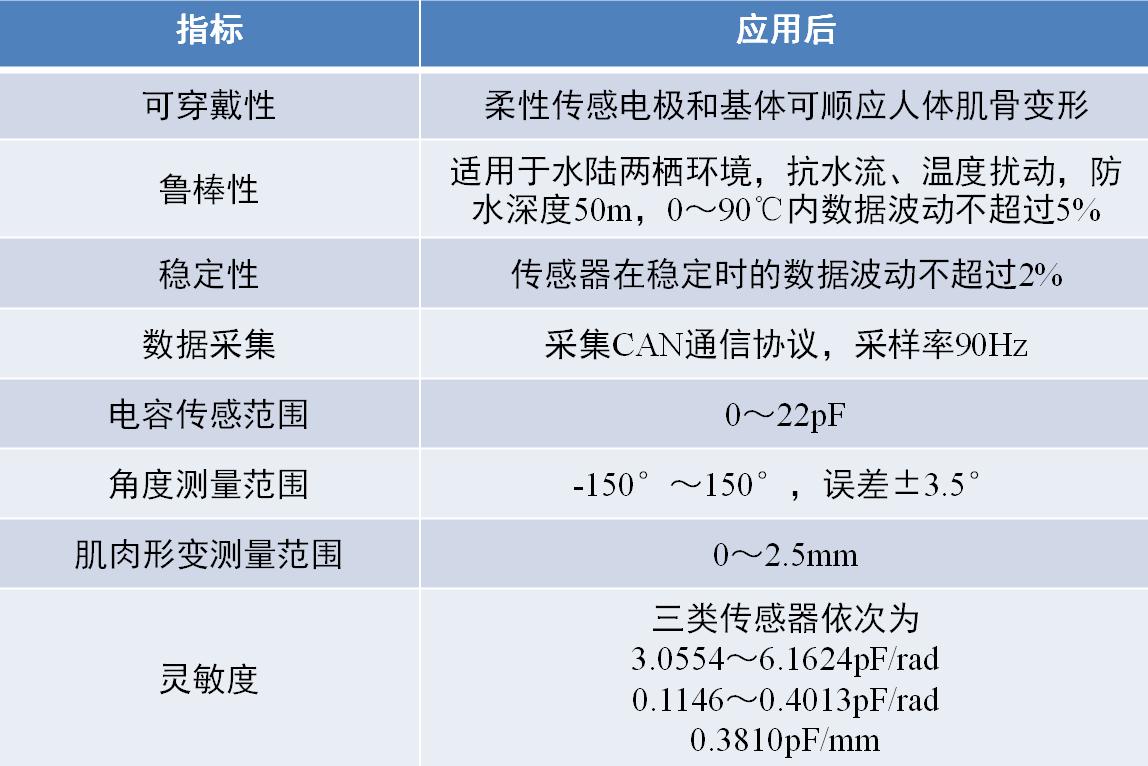
【技术指标】
该成果包括面向关节转角、肌肉形变、足底三维力等测量的可穿戴柔性传感系统,具体技术指标如下:
【应用场景】
面向体育运动、康复医疗、人机交互、可穿戴人工智能应用场景所需的人体运动数据采集与分析
【成果展示】
技术成熟度9级,实际应用于人体运动测试,可提供实物参展。
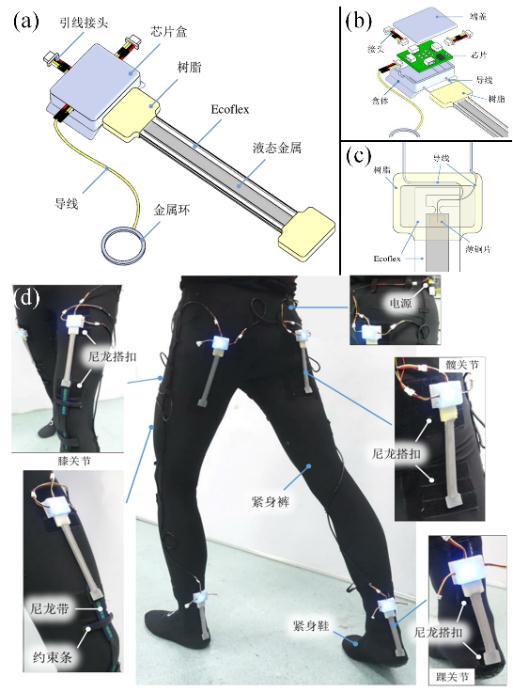
图1 可拉伸型角度传感器
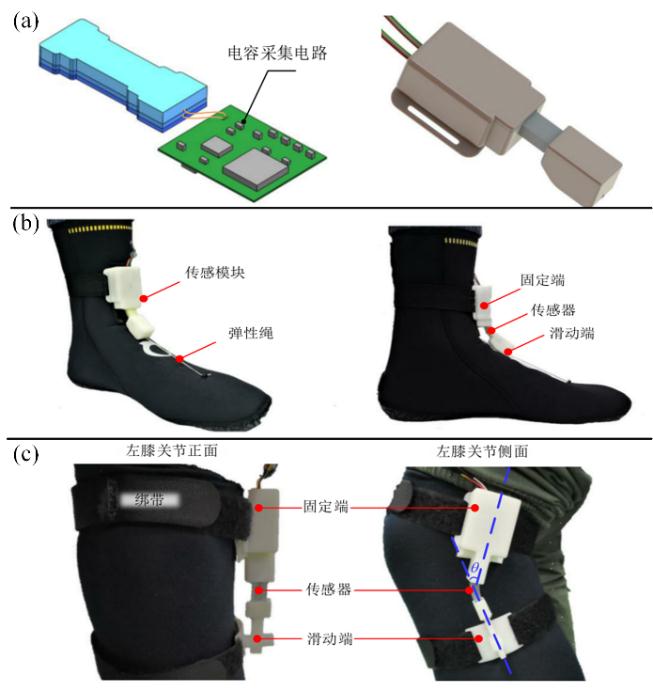
图2 可弯曲型角度传感器
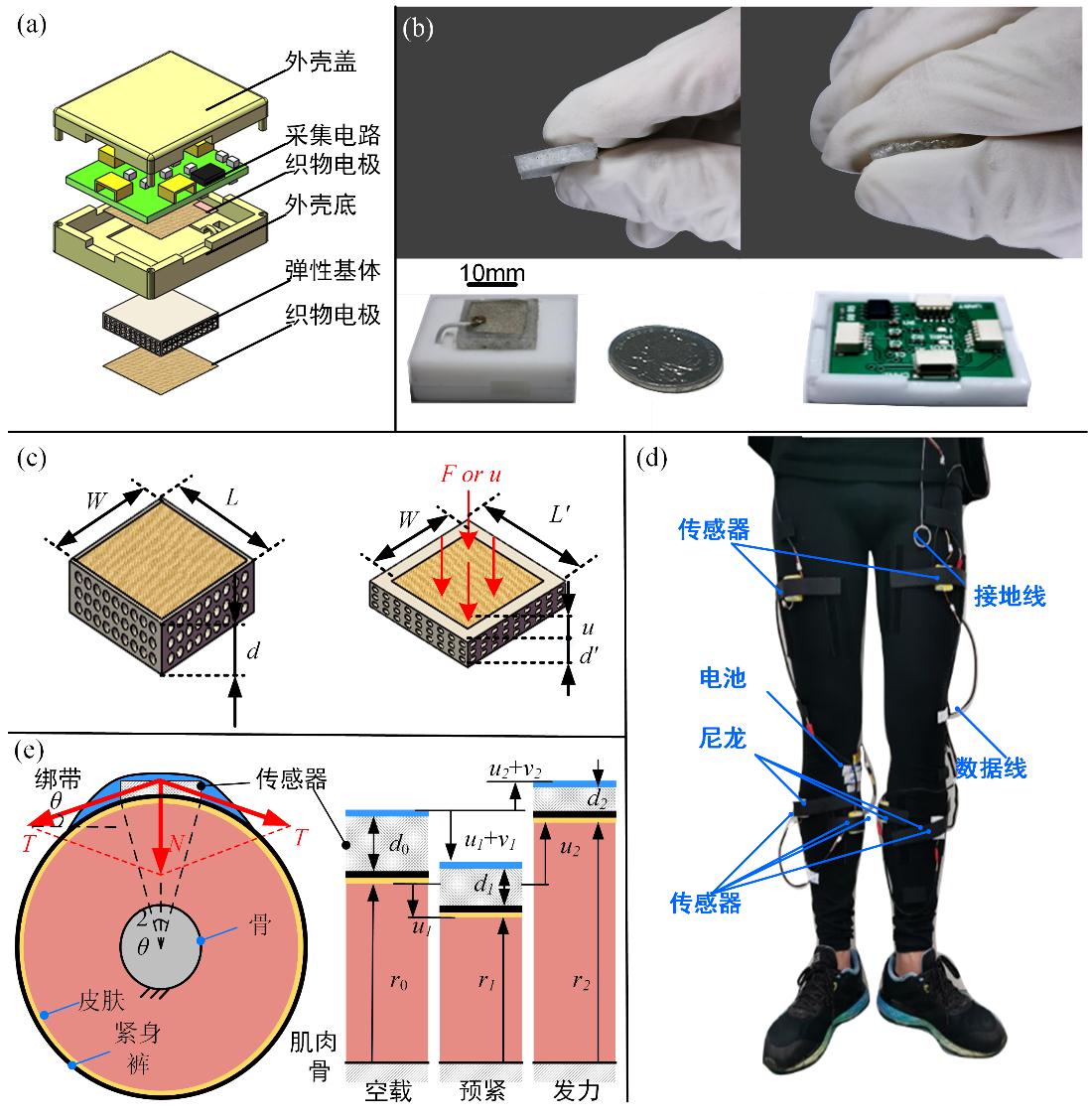
图3 肌肉形变传感器
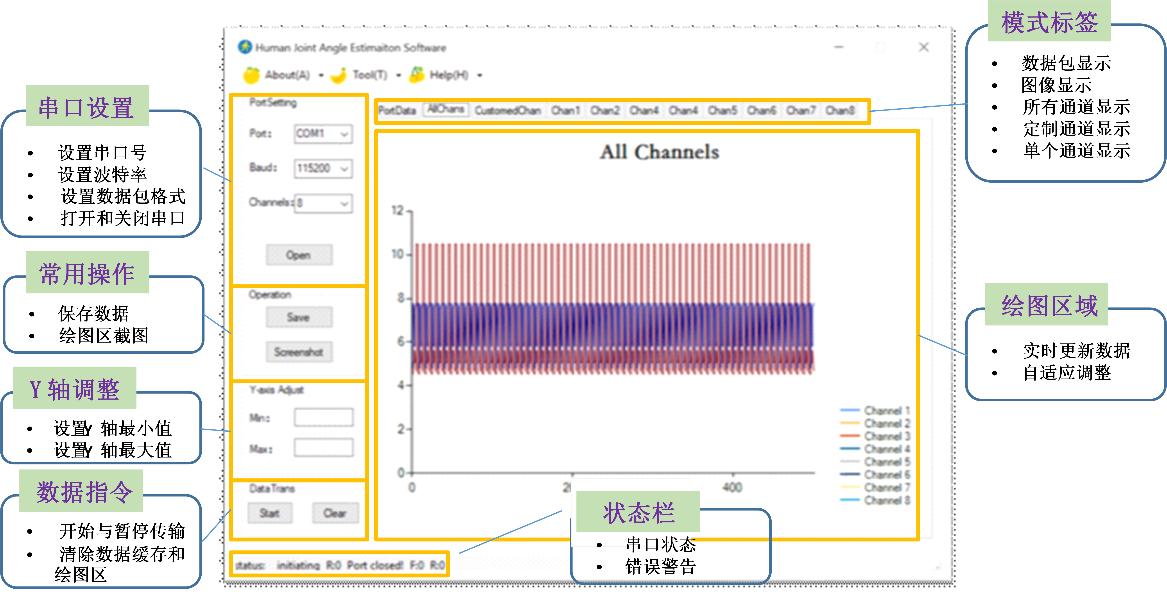
图4 数据采集软件界面
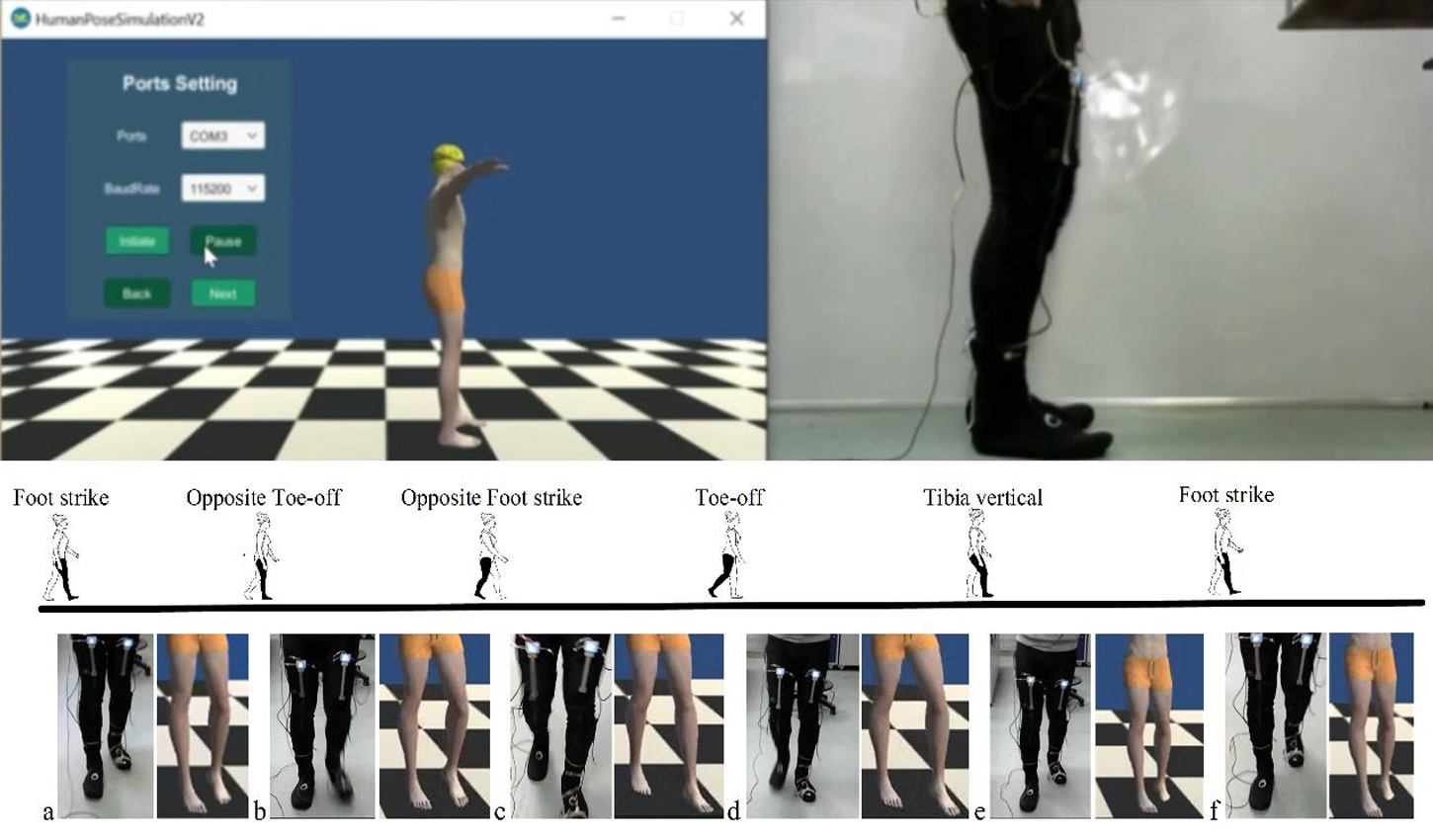
图5 运动实时模拟界面

图6 实验场景图
【知识产权】
该成果已申请多项中国发明专利,下表是部分展示:

【合作方式】
技术开发、技术服务、技术转让、技术许可、技术入股、面谈等
【专家介绍】

郭家杰,华中科技大学教授,博士生导师。2006年北京大学力学系本科毕业,2011年在美国佐治亚理工学院机械工程系获得博士学位 。围绕仿生机器人对生物体柔性肌骨系统运动的生物力学建模、分布式感知等基础科学问题,开展柔性机电一体化研究,获得国家自然科学基金、重点项目等资助。以第一作者在Springer-Nature、华科出版社联合出版英文专著1部,发表学术论文40余篇,授权发明专利/软件著作权7项。 担任中国康复医学会技术转化与产业促进专业委员会委员、《Current Mechanics and Advanced Materials》和《Current Chinese Engineering Science》编委、《Int. J. Intelligent Robotics and Applications》客座编辑、IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics国际会议编委。
【联系方式】
