【所属领域】
生命健康
【痛点问题】
城市工业化和大气环境污染的影响,患有鼻炎患者的群体越来越大。目前中国内地鼻炎患者已超过3亿。其中,患有慢性鼻窦炎(CRS)患者超过1亿人,另外亟需手术治疗的重度患者有700万。功能性鼻窦内窥镜手术 (FESS) 是一种使用直硬性内窥镜用于CRS 的微创外科手术,在通过鼻孔到上颌窦狭窄、弯曲的通道时,需要切除骨和软组织,这可能导致潜在的致命神经血管损伤。
市场上手术及诊断配备的功能性鼻窦内窥镜大多为国外品牌,其中史托斯和奥林巴斯占领 50%以上的市场。工业和信息化部等十部门联合印发的《“十四五”医疗装备产业发展规划》中,强调“要重点突破医用内窥镜等影像诊断设备 的战略目标,推动国产高端内窥镜领域的技术发展”。目前已商品化的软/柔性耳鼻喉内窥镜主要应用于鼻腔、鼻道的检测,现有柔性电子鼻咽镜产品末端大多采用一个自由度,无传感感知功能,无法实现空间多自由度弯曲以及3D高清成像,存在如图1所示的缺陷,难以进入鼻窦。因此,研发具有我国自主产权的国产高端鼻腔内窥镜,具有重要的战略意义和实际应用价值。
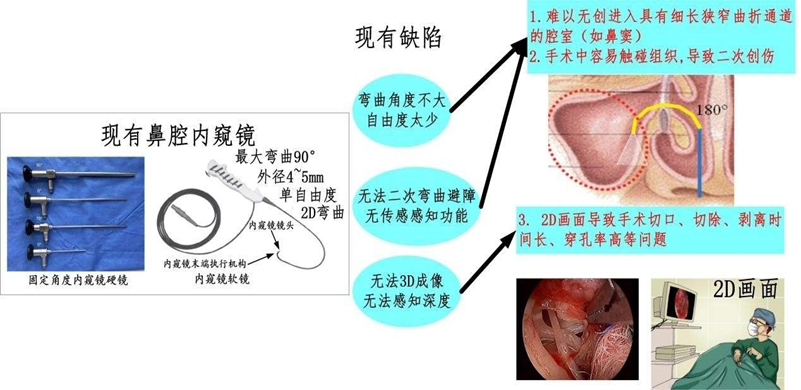
图1 现有内窥镜的缺陷
【解决方案】
MEMS扫描镜因其微型化、扫描频率高和低成本等优势,正引领着在体医疗成像等领域的技术革命;定量相位成像技术因其具备非常高的横向分辨率、时间相位稳定性和空间相位均匀性等优点,广泛应用于生物组织的三维成像方面。为此,针对鼻窦的生理结构特性以及手术实际需求,本成果开发一种基于MEMS扫描镜的鼻窦柔性机器人内窥系统,除具备高清、3D成像功能外,还具备多自由度主动控制、末端接触力实时感知功能,并能提供生物组织物理信息,以辅助医生判断病变组织,实现在疾病诊断和手术治疗等方面的应用,具有重要的理论意义和临床诊断价值。相关技术包括:
(1)面向实际手术需求的鼻窦内窥镜执行机构优化设计技术
为了使内窥镜多自由度执行机构的结构参数更符合人体鼻窦生理结构特性,需基于统计形状模型(SSM),对鼻窦CT数据进行图像分割、图像配准和图像重建,并根据所重建的三维结构,确定鼻腔内窥镜的工作空间,进而确定其基本的功能参数。在此基础上,根据最大弯曲角度、弯曲长度、载荷等要求,建立执行机构尺寸参数的优化模型,基于启发式算法求解,获得满足功能要求约束下的执行机构尺寸参数最优解。最后根据最优参数,设计鼻窦窥镜执行机构的三维模型,进行飞秒激光加工,从而得到满足耳鼻喉鼻窦内窥镜需要的执行机构工程样机。

图2 面向实际手术场景需求的执行机构结构优化设计流程
(2)鼻窦内窥镜感知传感技术
拟采用FBG传感器螺旋分布在内窥镜执行机构表面,形成执行机构形状传感器。建立管内弯曲曲率和扭转到轴向和剪切应变的映射模型,得到每个光纤光栅传感器的曲率-应变模型,进而建立四个螺旋缠绕FBG传感器的曲率、扭转和应变的线性关系,计算出曲率和扭转的测量值,从而得到执行机构弯曲形状,通过执行机构弯曲变形时每一点的曲率得出末端的位置。
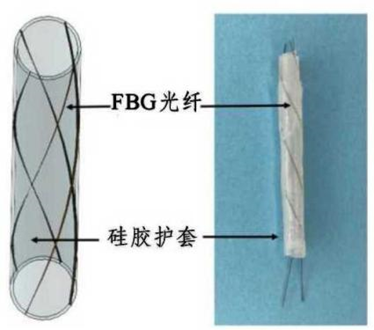
图3 已创建的螺旋分布式 FBG 传感器原型
(3)多传感器数据融合控制技术
针对鼻窦柔性机器人系统和装配的传感器(包括电机上的力传感器,FBG内窥镜的图像信息等),设计传感器数据融合架构,从而获得高精度、鲁棒的、一致的末端位姿控制。针对当前单一控制算法精度有限的问题,研究基于驱动力及摩擦力和滞回补偿模型,结合基于FBG数据及内窥镜柔性驱动的运动学模型而得到的末端的位置以及视觉数据等信息,实现数据和算法耦合,提高控制算法的精确性、实时性和稳定性,多数据融合控制。
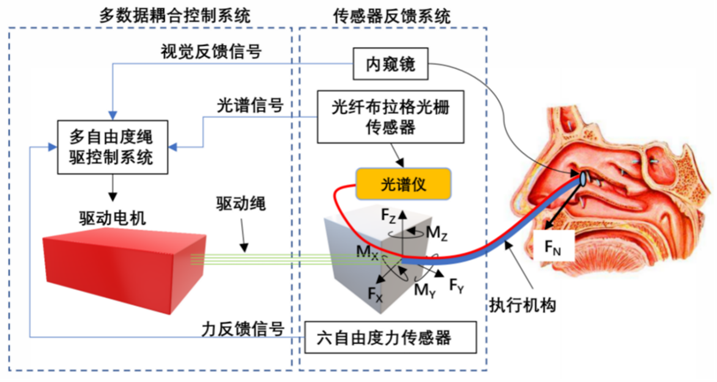
图4 已创建的螺旋分布式 FBG 传感器原型
(4)基于MEMS扫描镜的3D高清柔性成像系统微型化技术
基于MEMS扫描镜的3D高清柔性成像系统微型化技术包括:
①MEMS扫描镜:开展MEMS扫描镜结构设计与优化、扫描路径控制与优化、制作与测试;
②光纤式全息高清成像系统:蒙特卡洛模拟照明光在组织的传播路径和光能分布;利用Zemax软件仿真内窥镜探头的微物镜组,设计符合手术要求的微物镜尺寸;结合全息成像原理,设计模块化的光路,从而实现高清成像;将探头部分与成像部分灵活适配,具备显微技术优势的同时,保持探头的微小尺寸和便携性;
③针对图像处理与三维重建算法,利用两帧拼接法实现实时的流畅拼接;结合后处理拼接,根据图像在整个拼接中的最佳拟合来配准图像,提升拼接质量,降低变形;采用深度学习的方式,输入记录得到的光场深度信息,利用卷积神经网络训练张量,引入物理中的菲涅尔衍射,模拟人眼视觉处理方式,实现三维全息投影,解决3D重构时计算量大、耗时长、硬件要求高的问题;纯相位全息图发掘最佳编码,从而避免复杂计算,准确、实时地恢复出3D效果,并解决背景遮挡带来的影响。
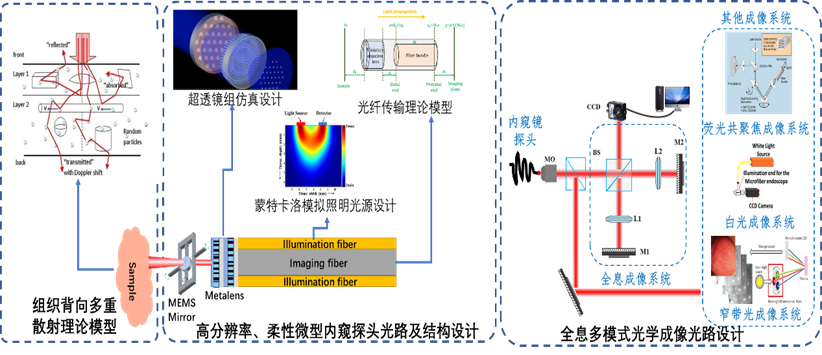
图5 光纤式全息高清内窥式成像技术光路原理设计方案图
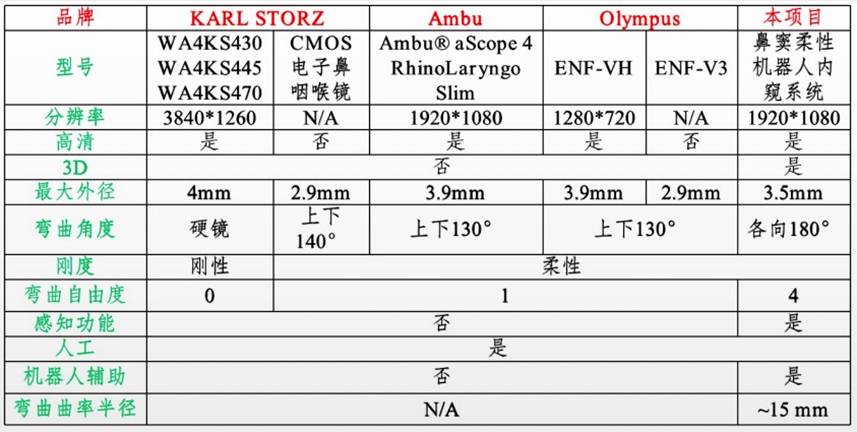
【技术指标】
表1 现有市售最先进的鼻腔内窥镜和本成果对比
【竞争优势】
(1)本成果鼻窦柔性机器人高清内窥系统基于大弯曲多自由度的设计,可扩大其在鼻窦内的工作范围,灵活扫描鼻窦盲区;3D高清内窥镜可高清准确采集病变区域图像,为医生提供高保真的病理信息。
(2)与目前进行鼻窦手术方法相反,柔性机器人内窥镜将允许内窥镜通过鼻孔进入上颌窦,而无需有意切除鼻窦周围的骨骼和软组织。
(3)使用具有可控远端灵活性的内窥镜观察上颌窦盲区将防止对关键结构的术中损伤并减少诊断错误。因此与传统鼻窦手术相比,基于本项目鼻窦柔性机器人高清内窥系统的诊断提供了一种更安全的鼻窦检测替代方案。一旦机器人内窥镜进入之前无法到达的位置,高端的三维高清成像将确保准确的诊断信息,从而首次实现了在柔性内窥镜下进行具有高可信度的三维内窥镜诊断功能,这是现有的柔性内窥镜无法比拟的。
(4)鼻窦柔性机器人3D高清内窥系统聚焦于微创、准确诊断、高质量成像以及程序安全性等相关技术,有望改善手术结果并缩短恢复时间。
【技术成熟度】
研发阶段。
【产业化应用】
本成果集临床医学、机器人学、微电子学、光纤传感检测技术、超弹性材料力学等多领域多学科多技术的融合,可以促进和加快在材料、光纤等相关领域的企业向医疗器械领域的延伸和发展,从而能进一步促进整个医疗器械领域对内窥镜技术的发展和升级换代,形成新一代具有感知功能的机器人辅助内窥检测系统。
应用前景
基于鼻窦炎患者的庞大群体,医疗内窥镜的具有较大需求,成果的产业化将具有很好的经济效益,形成相关产业链,推动经济发展。
发展规划
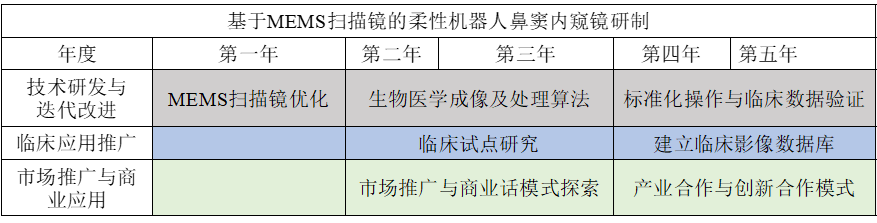
图6 发展规化示意图
知识产权
该成果已申请/授权多项中国发明专利。
合作方式
专利许可、专利转让、作价入股、技术开发、面谈等。
【联系方式】

CG25004